인텔 Depth 카메라는 2가지 라인업으로 나오고 있습니다. 용도에 따라 다른데요.
가까운 물체 (F200,SR300)
멀리 있는 물체 (R200)
이렇게 두 가지 용도로 나눠 라인업을 구성했습니다.
여기서 살펴볼 제품은 가까운 물체를 위한 F200과 그 후속 제품인 SR300이 있습니다. 여기서는 SR300만 볼텐데요. 두 개의 외관은 100%똑같고 성능차이가 있습니다. 또 하나는 멀리있는 물체를 위한 R200을 살펴보겠습니다. 우선 SR300 외관을 보면 이렇게 생겼습니다.
 |
| SR300 출처 - https://software.intel.com/en-us/articles/introducing-the-intel-realsense-camera-sr300 |
SR300을 살펴보면 다른 Depth카메라와 같이 IR projector와 IR 카메라, Color카메라를 가지고 있어 depth 정보와 함께 color이미지도 같이 얻을 수 있습니다. 역시나 USB3.0에서만 작동합니다. 처음 홍보 때와 같이 윈도우 10의 얼굴인식용, 스카이프에 중점을 둔 것처럼, 거치할 수 있는 관절과 마이크를 내장하고 있는 것이 특징입니다.
최적거리는 실내에서 20cm~120cm 입니다. depth는 640x480으로 초당 60프레임 얻을 수 있으며 color는 FHD는 30FPS, HD는 60FPS 성능으로 얻을 수 있습니다. 밑에서 자세한 스펙을 볼 수 있습니다.
 |
| SR300 스펙 출처 - https://software.intel.com/en-us/articles/introducing-the-intel-realsense-camera-sr300 |
인텔 realsense의 또 다른 라인업인 R200을 살펴볼텐데요. 거치대와 마이크가 없고 카메라로만 구성되어 있어 굉장히 작고 간결한 모습을 볼 수 있습니다.
 |
| R200 출처-http://reconstructme.net/qa_faqs/intel-realsense-r200-review/ |
 |
| R200 카메라 배치와 이미지들 출처-https://software.intel.com/en-us/articles/realsense-r200-camera |
R200을 살펴보면 다른 카메라와 다르게 IR카메라가 2개 있고 IR projector와 Color카메라가 있습니다. 실제로 두 개의 IR카메라에서 얻어진 이미지를 Stereo vision으로 depth를 구합니다. 여기서 IR Projector는 굴곡이 없는 평면적인 물체를 인식하는데 도움을 주는 역할을 합니다.
최적거리는 실내에서 50cm~350cm입니다. 그리고 밖에서 10M까지 사용할 수 있다고 합니다. 그러나 조건에 따라 가능하므로 사용하기 전에 intel document를 보시는 것을 추천합니다. 실제 물체 스캔이나 카메라 트래킹에 사용하시는 것이면 이 모델을 사용하시는 것이 좋습니다.
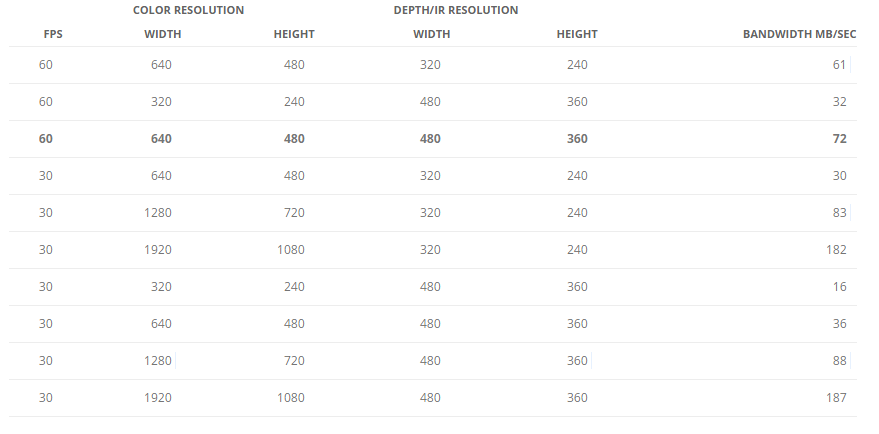 |
| R200 해상도와 FPS 출처-http://reconstructme.net/qa_faqs/intel-realsense-r200-review/ |
위의 표를 보면 굵게 처리되어있는 부분이 추천되는 해상도 입니다. 저같은 경우는 둘다 640x480을 사용하고 있습니다. 그리고 주의할 점으로 이 제품은 class 1에 해당하는 레이저를 사용하고 있습니다.
이 하드웨어를 실제로 이용하려면 드라이버와 SDK를 설치해야합니다. 모두 인텔 공식 홈페이지에서 구할 수 있습니다. 그러나 저는 실제로 SDK를 사용하기보다 library형태로 open해서 배포하고 있는 librealsense를 사용합니다. 사용하기 더 쉽고 리눅스에서도 사용가능한 것이 장점이나 공식적인 intel제품이 아니며 SDK에서 미리 구현해놓은 얼굴인식, 트래킹 등을 사용할 수 없다는 것이 단점입니다.
reference - https://software.intel.com/en-us/realsense/home